POSTS BLOG
Metodología SORA
Las siglas de SORA provienen de “Specific Operations Risk Assesment”. Es la metodología creada por JARUS (Joint Authorities Rulemaking on Unmaned Systems) mediante la que se establece el procedimiento para crear, evaluar y realizar una operación con drones de forma segura, analizando la naturaleza de todas las amenazas asociadas con un peligro específico, su diseño, y las mitigaciones propuestas para una operación específica con UAS.
Esta metodología es la elegida por la UE para cumplir con los requisitos del artículo 11, en el que se evalúan los riesgos y se aprueba una operación para la denominada Categoría Específica para la generación de los Escenarios Estándar y las Autorizaciones Operacionales.
La metodología está creada por un conjunto de pasos ordenados mediante los cuales se combina el análisis de la operación, los riesgos y la aplicación de las medidas de mitigación para su reducción.
A continuación se define el proceso en el que se basa la metodología SORA.
Concepto de Operaciones (ConOps)
En ella se recogerá toda la información relacionada con:
- Altura máxima de las operaciones
- Tipo de operación: VLOS, BVLOS
- Diurno / nocturno
- Horario orientativo de los vuelos
- Tipología del espacio aéreo
- Tipología del área en tierra
- Características de la Aeronave y equipos a utilizar
Además, dentro del ConOps deberá definirse el Volumen Operacional y los búfers de seguridad en aire y tierra, según el Modelo Semántico que se describe dentro de la propia metodología.
Modelo semántico
Según la definición del Modelo Semántico en la metodología SORA, en los vuelos realizados con drones nos podemos encontrar en dos situaciones:
Operación Controlada
La Operación Controlada es aquella en la que todo transcurre teniendo el control total de los drones. Esta situación incluye a su vez la Operativa Normal con Procedimientos Operacionales Estándar y aquellas Situaciones Anormales que conllevan a la aplicación de los Procedimientos de Contingencia.
Operación Controlada | |
Operativa normal | Situación anormal |
Procedimientos operacionales estándar | Procedimientos de contingencia |
Operación No Controlada
Si perdemos el control de la operación nos encontraremos en una situación de emergencia y, donde se deberán aplicar los Procedimientos de Emergencia y ejecutar el Plan de Respuesta ante Emergencia (ERP).
Pérdida de control de la operación |
Situación de emergencia |
Procedimientos de emergencia |
Plan de Respuesta ante Emergencia |
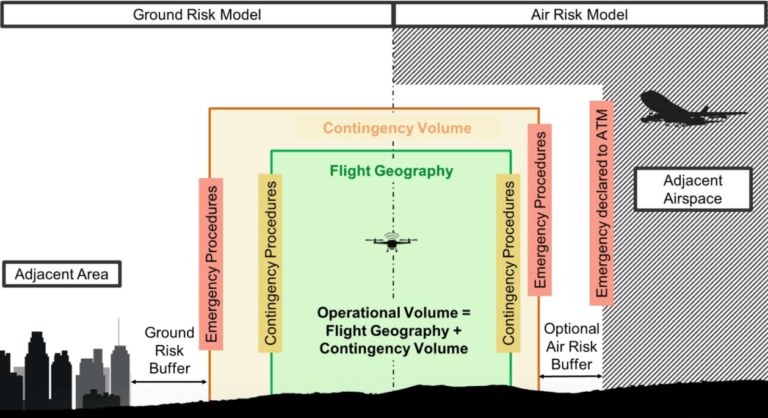
Toda operación con drones debe ser planificada y realizada dentro de un Volumen Operacional formado por distintas áreas definidas en el suelo como en el aire, donde se definen los límites máximos de vuelo que las aeronaves podrán alcanzar en el peor de los casos.
Según el modelo semántico, se definen los volúmenes operacionales como:
Geografía del Vuelo (Flight Geography)
Se refiere a un volumen geográficamente definido, espacial y temporalmente, que se encuentra totalmente contenido dentro del volumen de operación. La geografía de vuelo representa el volumen de espacio aéreo donde el operador tiene la intención de que el vuelo quede confinado.
Volumen de contingencia (Contingency Volume)
Se refiere al volumen contenido entre los límites interior y exterior del volumen de operación y la geografía de vuelo, respectivamente. Este volumen se define para contemplar las posibles excursiones fuera del volumen de la geografía de vuelo.
Margen de riesgo en tierra y aire (Ground Risk Buffer / Air Risk Buffer)
Esta se define en la metodología SORA como el área operacional prevista que solo involucra a participantes activos, si los hubiera.
Área adyacente / espacio aéreo adyacente (Adjacent Area / Adjacent Airspace)
Se definen como las áreas en las que los UAS accederán si los sistemas de emergencia fallaran. En estas zonas se debe estudiar el volumen de personas que puede haber (por ejemplo una zona urbana) y la proximidad a aeropuertos, densidad del tráfico aéreo, etc.
En el siguiente esquema se puede observar que tanto en GRC como ARC, las zonas definidas como Geografía de Vuelo y Volumen de Contingencia corresponden a Operaciones Controladas, y las definidas como Búfer de Riesgo en aire y tierra y Áreas Adyacentes en aire y tierra son aquellas en las que no se tiene control de los UAS.
Una vez se completa la definición total y específica del tipo de operación, se puede seguir con el análisis de los riesgos.
Riesgo en Tierra (GRC)
La Clase de Riesgo en Tierra o GRC (Ground Risk Class) se define como el riesgo de que una persona sea golpeada por un drone. Para determinar el GRC se deben considerar:
- las características de las aeronaves (peso y dimensiones)
- el área en la que se realizará el vuelo
- Tipología de vuelo que se realizará
De esta forma, SORA nos ofrece la siguiente tabla mediante la que podremos ver cuál es el GRC inicial correspondiente a la operación pretendida:
Índice de Riesgo en Tierra intrínseco del UAS | ||||
Dimensiones máximas del UA | 1 m | 3 m | 8 m | >8 m |
Energía cinética típica esperada | < 700 J | < 34 KJ | < 1084 KJ | > 1084 KJ |
Escenarios Operacionales |
|
|
|
|
VLOS/BVLOS sobre una zona controlada en suelo | 1 | 2 | 3 | 4 |
VLOS sobre una zona escasamente poblada | 2 | 3 | 4 | 5 |
BVLOS sobre una zona escasamente poblada | 3 | 4 | 5 | 6 |
VLOS sobre una zona poblada | 4 | 5 | 6 | 8 |
BVLOS sobre una zona poblada | 5 | 6 | 8 | 10 |
VLOS sobre aglomeración de personas | 7 |
| ||
BVLOS sobre aglomeración de personas | 8 | |||
Mitigaciones del Riesgo en Tierra (GRC)
Una vez se ha determinado el GRC inicial, se deben aplicar mitigaciones para reducir el riesgo y así obtener el valor del GRC Final.
Estas medidas de mitigación son:
- Se dispone de sistemas de contención técnica implementada y efectiva
- Se dispone de sistemas que reducen los efectos del impacto sobre personas en tierra
- Se dispone de un Plan de Respuesta a la Emergencia efectivo, disponible para su uso, y que ha sido validado
Valor de Riesgo en Tierra (GRC) Final
Llegados a este punto es interesante analizar y entender el concepto de Robustez aplicado dentro de la metodología SORA. Según dicha metodología, la robustez de las medidas de mitigación se define mediante el Nivel de Integridad que ofrece cada una de las mitigaciones (por ejemplo, la mejora en seguridad), y el nivel de garantía de seguridad que las mitigaciones han logrado alcanzar (por ejemplo, el método por el que se demuestra).
Nivel de Robustez = Nivel de integridad + Nivel de garantía
Así pues, nos encontramos 3 tipos de niveles de Robustez:
- Robustez baja
- Robustez media
- Robustez alta
Así pues, según los valores de Robustez de las medidas de mitigación aplicadas, se podrá reducir el valor del GRC y obtener el valor del GRC Final, teniendo siempre en cuenta que no podrá reducirse por debajo del valor mínimo de la columna resultante de la tabla “Índice Ground Risk Class intrínseco del UAS”.
| Robustez | |||
Mitigación número | Adaptación del GRC | Baja/ Ninguna | Media | Alta |
M1 | Se dispone de sistemas de contención técnica implementada y efectiva
| 0 / -1 | -2 | -4 |
M2 | Se dispone de sistemas que reducen los efectos del impacto sobre personas en tierra | 0 | ‐1 | ‐2 |
M3 | Se dispone de un Plan de Respuesta a la Emergencia efectivo, disponible para su uso, y que ha sido validado | 1 | 0 | -1 |
Riesgo en el Aire (ARC)
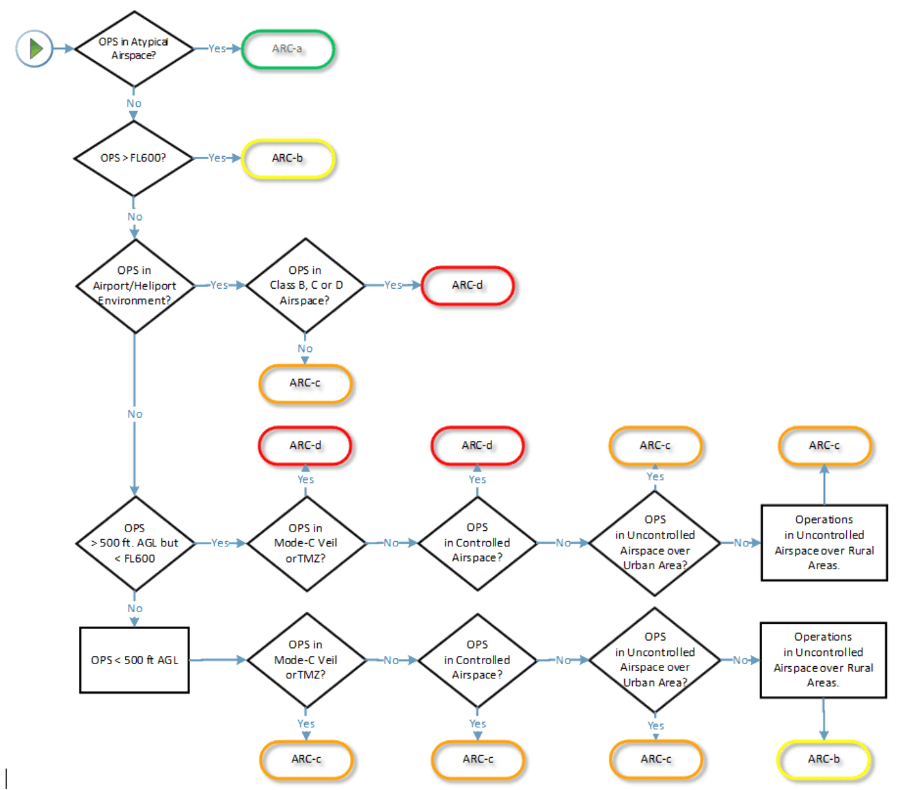
Aparte de analizar el riesgo en tierra, SORA también determina el riesgo de colisión en el aire según el espacio aéreo definido en el ConOps en el que se operará. Este valor de riesgo se denomina Clase de Riesgo en el Aire o ARC (Air Risk Class). Así pues, el ARC es la clasificación según el ratio en el que un dron puede encontrarse una aeronave tripulada en un espacio aéreo típico.
Para saber el ARC inicial, SORA pone a disposición un esquema en el que, mediante el espacio aéreo en el que se volará previamente definido en el ConOps, se obtendrá el valor:
Una vez conocido el ARC inicial, es necesario determinar las medidas de mitigación necesarias para poder reducirlo:
Mitigaciones Estratégicas del Riesgo en el Aire (ARC)
Son aquellas en las que se podrá reducir el ARC ajustando ciertos aspectos previos a la operación. Estas pueden depender de mitigaciones aplicadas por el propio operador, por ejemplo:
- El horario en el que se realizará el vuelo
- El tiempo de duración del vuelo
O mitigaciones que no dependen del operador, como por ejemplo las propias normativas y regulaciones, como por ejemplo:
- Limitación de los 400 pies de altura de los drones
- Limitación de distancia máxima de vuelo
Mitigaciones Tácticas del Riesgo en el Aire (ARC)
Las mitigaciones tácticas son aquellas que se aplican para reducir el riesgo residual de colisión aérea. Es decir, son aquellas que el piloto y su equipo aplican en el momento de la realización del vuelo, como por ejemplo:
- Ver y evitar (See and Avoid)
- comunicación con los servicios de ANSP
Valor Residual del Riesgo en el Aire (ARC)
Después de haber aplicado ambos tipos de mitigaciones se determinará el valor del riesgo residual en el aire, conocido como ARC Residual o Final.
Muchas de las mitigaciones que se aplican para la reducción del ARC se determinan en las pre-coordinaciones con los ANSP.
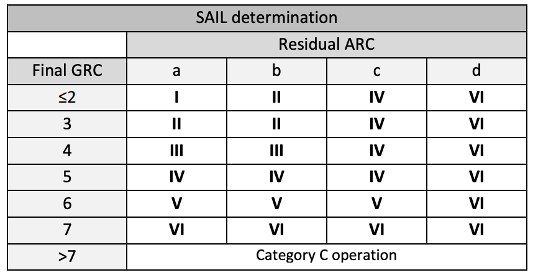
SAIL
Una vez obtenidos tanto los valores del GRC Final y ARC Final se podrá obtener el último valor que necesitamos: el SAIL (Specific Assurance and Integrity Level).
El SAIL es un índice que va desde el valor uno al seis que nos indicará la garantía e integridad de las medidas que deberemos aplicar, es decir, la Robustez.
Así pues, podemos decir que un valor bajo de SAIL implicará un valor bajo de Robustez de las mitigaciones a aplicar, siendo el correspondiente a operaciones con riesgo bajo. En cambio, un valor más elevado de SAIL implicará una Robustez superior, ya que el riesgo de la operación será, en consonancia, más elevado.
OSO – Objetivos de Seguridad Operacional
Con el riesgo de la operación categorizado con el índice SAIL, deberemos empezar a aplicar los distintos niveles de Robustez de cada una de las mitigaciones a aplicar. Esto se traduce en lograr unos Objetivos de Seguridad Operacional, o lo que es lo mismo: OSO (Operational Safety Objectives).
Una vez más deberemos consultar en una tabla el valor de Robustez a aplicar para cada uno de los OSO correspondientes. Para determinar dichos objetivos debemos utilizar el índice SAIL obtenido en el punto anterior. En la imagen siguiente se puede observar una muestra de una parte de los OSO a aplicar del total de los 24 existentes:
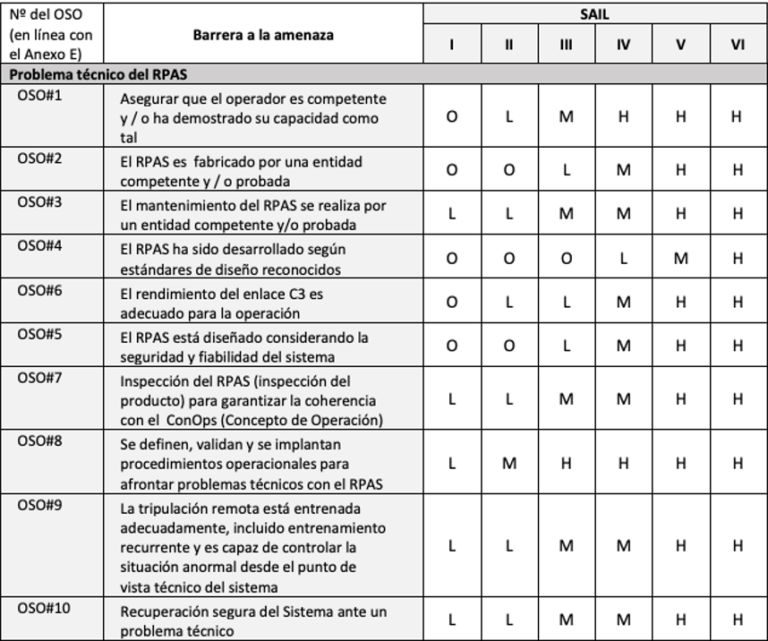
Según el índice de SAIL obtenido se puede obtener un valor que nos indicará el objetivo del valor de Robustez. Estos son:
- O: opcional
- L: nivel bajo
- M: nivel medio
- H: nivel alto
Una vez sabemos qué nivel de robustez se debe aplicar, el último paso será consultar en las listas publicadas por EASA cómo alcanzar los valores de garantía e integridad.
Área y espacio adyacente
Llegados a este punto podemos tener la sensación de haber terminado con todo el proceso, pero aún nos queda un paso muy importante: el análisis del área y espacio adyacente.
Recordemos que durante la definición del ConOps hemos definido un volumen operacional formado por la Geografía de Vuelo, el Volumen de Contingencia y los búfers de seguridad en tierra y aire. No obstante, ahora es el momento de mirar más allá de estos límites y analizar qué nos encontraremos una vez cruzamos los límites de los búfers de tierra y aire.
Debemos analizar el riesgo asociado a las áreas adyacentes, tanto en tierra como en aire, y determinar si pueden ser mayores o menores que los riesgos dentro del volumen operacional, en el que ya se aplican las medidas de mitigación correspondientes al índice SAIL obtenido. Si el riesgo es superior, deberán aplicarse y garantizarse una serie de requisitos, como por ejemplo:
- La probabilidad de que las aeronaves puedan escapar del Volumen Operacional debe ser demostrada de manera acorde al riesgo ocasionado al escapar de dicho Volumen Operacional
- Ningún error único de los UAS u otro sistema externo puede derivar en que la aeronave escape del búfer de seguridad
- El Software y la electrónica de vuelo, cuyos errores de desarrollo pudiesen ocasionar un escape fuera de los búfers de riesgo, deberán ser creados mediante un estándar o metodología aceptada por EASA.
Para poder cumplir con los puntos anteriores, en algunos casos, es necesario la utilización de sistemas externos e independientes de Terminación de Vuelo (Flight Termination System – FTS), que a su vez deberán cumplir con una serie de requisitos adicionales.
Si no se pueden justificar los requisitos o bien no se puede garantizar que el FTS funciona y está diseñado según los estándares, se deberá aumentar el tamaño de los búfers en tierra y aire lo suficiente para que las aeronaves no puedan escapar de estos.
Informe de seguridad
Finalmente, es el momento de recopilar toda la información y datos obtenidos de la metodología SORA y recopilarlos en el Informe de Seguridad, que a su vez servirá para demostrar a las autoridades, gestores de espacio aéreo u otros afectados como se está aplicando la metodología.
En este informe se debe incluir:
- El procedimiento SORA:
- El Concepto de Operación (ConOps)
- Mitigaciones utilizadas para la reducción del GRC
- Mitigaciones estratégicas del ARC
- Mitigaciones tácticas del ARC
- Análisis del área adyacente en tierra y en el aire
- Índice SAIL y OSO
- La justificación satisfactoria de las mitigaciones y los objetivos requeridos por el proceso SORA.
- El operador de UAS debe asegurarse de abordar cualquier requisito adicional que no haya sido identificado por el proceso SORA.
- El operador de UAS debe garantizar que el procedimiento SORA sea coherente con las condiciones operativas reales.