BLOG POSTI
Geocaging dell'UAS C6
In questo articolo spiegheremo cos’è il Geocaging e la sua relazione diretta con la modellazione semantica secondo la metodologia SORA e con altri sistemi critici dell’aviazione
Cos'è il geocaging nei droni
Questa funzione è già presente in diversi produttori, ma è diversa da quella richiesta per i droni di classe C6
Geocaging per droni di classe C6 per lo scenario standard STS-02
Per la certificazione di un drone C6, il requisito di geocaging è più complesso ed è direttamente correlato al modello semantico descritto nella metodologia SORA In questo caso, non ci limitiamo più a delimitare la distanza orizzontale e verticale a cui permettiamo all’aereo di volare, ma dobbiamo definire la geografia di volo e il volume operativo
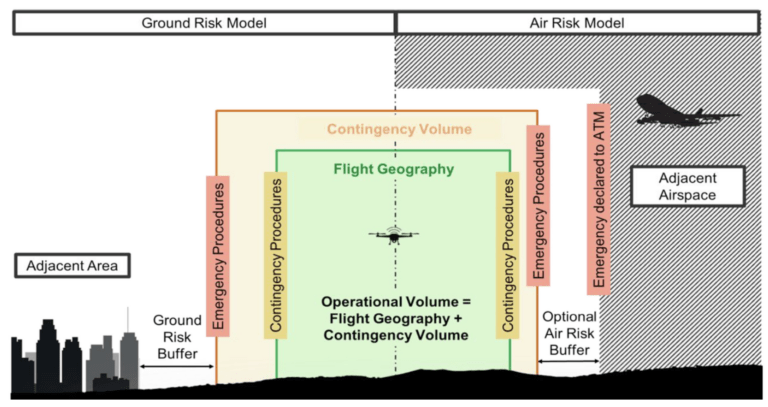
Queste “zone” possono essere semplici, come un cerchio intorno al punto di decollo, o un poligono con molti punti adattati all’area che si desidera volare Inoltre, a seconda dell’area di volo, può essere necessario stabilire altezze diverse in punti diversi della geografia di volo
Sistemi collegati al Geocaging
La funzione principale del Geocaging è quella di evitare che l’aereo esca dalla Geografia di volo; A tal fine, il Geofencing deve informare il pilota attraverso una mappa e avvisi sull’unità di controllo quando il velivolo esce dai limiti stabiliti Inoltre, una volta superati questi limiti, devono essere attivate manovre di emergenza affinché l’aeromobile torni alla Geografia di volo
Se non fosse possibile riportare l’aeromobile nella Geografia di Volo e questo finisse per uscire dal Volume Operativo, l’attivazione del “Sistema di Terminazione del Volo” deve avvenire automaticamente.
Regolamentazione, limiti e sistemi degli UAS
Richiedendo l’equipaggiamento di questo tipo di sistema, la sicurezza dell’operazione viene automaticamente migliorata, riducendo il carico di lavoro durante il volo per il pilota remoto. Inoltre, il collegamento tra le valutazioni di sicurezza effettuate dal pilota remoto prima del volo è direttamente collegato alla configurazione dell’aeromobile, fornendo coerenza tra i limiti del CONOPS e l’esecuzione del volo in tempo reale