BLOG POSTS
Geocaging the UAS C6
In this article, we are going to explain what Geocaging is and its direct relationship with the semantic model according to the SORA methodology and other critical aircraft systems.
What is Geocaging in Drones
This function is already equipped by various manufacturers today, but it is different from what is required for C6 class drones.
Geocaging for C6 class drones for standard scenario STS-02
For the certification of a C6 drone, the Geocaging requirement is more complex and is directly related to the semantic model described in the SORA methodology. In this case, we no longer only delimit the horizontal and vertical distance to which we allow the aircraft to fly, now we must define the flight geography and the operational volume.
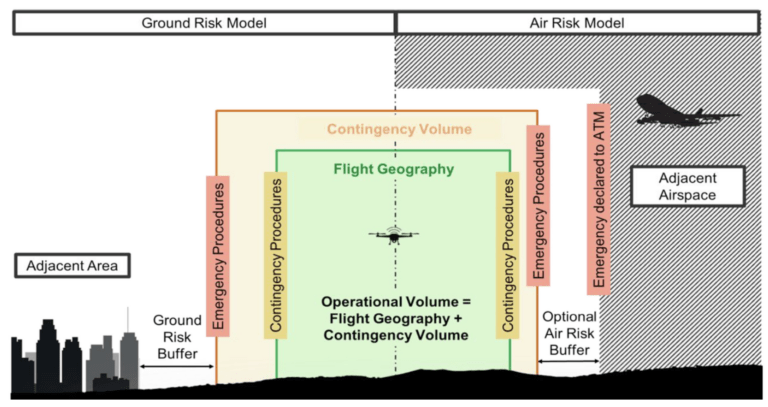
These “zones” can be simple, like a circle around the takeoff point, or a polygon with many points adapted to the area you want to fly. In addition, depending on the flight area, it may be necessary to establish different heights at different points in the flight geography.
Systems linked to Geocaging
The main function of Geocaging is to prevent the aircraft from leaving the Flight Geography. To do this, Geofencing must inform the pilot through a map and warnings on the control unit when the aircraft leaves the established limits. In addition, once these limits are crossed, contingency maneuvers must be activated for the aircraft to return to the Flight Geography.
If it were not possible to return the aircraft to the Flight Geography and it ended up leaving the Operational Volume, the activation of the “Flight Termination System” must come into action automatically.
Regulation, limits, and systems of the UAS
By requiring this type of system to be equipped, the safety of the operation is automatically improved, reducing the workload during the flight for the remote pilot. In addition, the link between the safety assessments carried out by the remote pilot before the flight is directly linked to the configuration of the aircraft, providing coherence between the limitations of the CONOPS and the execution of the flight in real time.