POSTS BLOG
Geocaging para UAS C6
En este artículo vamos a explicar que es el Geocaging y su relación directa con el modelo semántico según la metodología SORA y otros sistemas críticos de la aeronave.
Que es el Geocaging en los drones
Esta función ya se equipa por distintos fabricantes hoy en día, pero es distinta de la que se requiere para los drones de clase C6.
Geocaging para drones clase C6 para escenario estándar STS-02
Para la certificación de un dron C6 el requisito del Geocaging es más complejo y se relaciona directamente con el modelo semántico descrito en la metodología SORA. En este caso ya no únicamente delimitamos la distancia horizontal y vertical a la cual permitimos volar la aeronave, ahora debemos definir la geografía de vuelo y el volumen operacional.
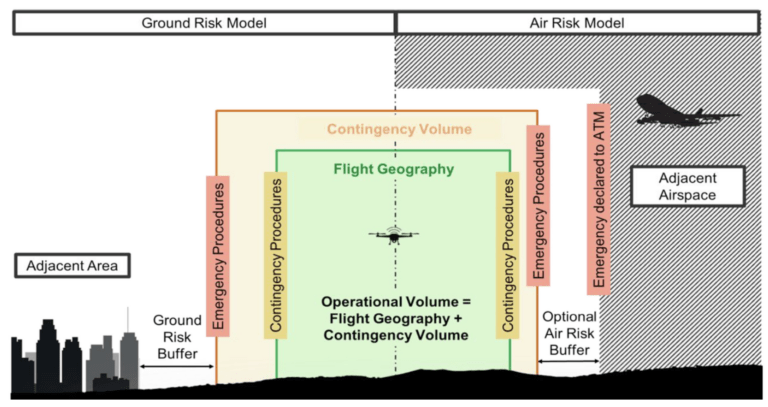
Estas “zonas” pueden ser sencillas, como un círculo alrededor del punto de despegue, como un polígono con muchos puntos adaptado a la zona que se quiera volar. Además, dependiendo de la zona de vuelo es posible que se tengan que establecer distintas alturas en distintos puntos de la geografía de vuelo.
Sistemas vinculados al Geocaging
La función principal del Geocaging es la de impedir que la aeronave salga fuera de la Geografía de Vuelo. Para ello, el Geofencing deberá informar al piloto mediante un mapa y avisos en la unidad de control cuando la aeronave salga de los límites establecidos. Además, una vez cruzados esos límites deberán activarse las maniobras de contingencia para que la aeronave vuelva a la Geografía de Vuelo.
En el caso de que no fuera posible devolver la aeronave a la Geografía de Vuelo y terminara saliendo del Volumen Operacional, la activación del “Sistema de Terminación de Vuelo” deberá entrar en acción de forma automática.
Regulación, límites y sistemas del UAS
Mediante la obligación de equipar este tipo de sistemas, se mejora la seguridad de la operación de forma automática, reduciendo la carga de trabajo durante el vuelo para el piloto remoto. Además, la vinculación entre las evaluaciones de seguridad realizadas por el piloto remoto antes del vuelo se vinculan directamente con la configuración de la aeronave, aportando coherencia entre las limitaciones del CONOPS y la ejecución del vuelo en tiempo real.