BLOG POSTS
Geocaging pour les UAS C6
Dans cet article, nous allons expliquer ce qu’est le Geocaging et sa relation directe avec le modèle sémantique selon la méthodologie SORA et d’autres systèmes aéronautiques critiques
Qu'est-ce que le Geocaging dans les Drones
Cette fonction est déjà proposée par plusieurs fabricants, mais elle est différente de celle exigée pour les drones de classe C6
Geocaging pour les drones de classe C6 pour le scénario standard STS-02
Pour la certification d’un drone C6, l’exigence de Geocaging est plus complexe et est directement liée au modèle sémantique décrit dans la méthodologie SORA Dans ce cas, il ne s’agit plus seulement de délimiter la distance horizontale et verticale à laquelle nous autorisons l’avion à voler, mais aussi de définir la géographie du vol et le volume opérationnel
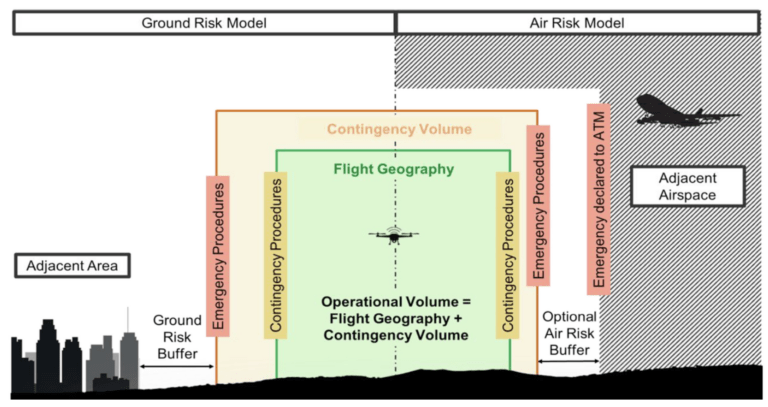
Ces « zones » peuvent être simples, comme un cercle autour du point de décollage, ou un polygone avec de nombreux points adaptés à la zone que vous souhaitez survoler En outre, selon la zone de vol, il peut être nécessaire d’établir des hauteurs différentes en différents points de la géographie du vol
Systèmes liés au Geocaging
La fonction principale du Geocaging est d’empêcher l’avion de quitter la géographie de vol Pour ce faire, le Geofencing doit informer le pilote par le biais d’une carte et d’avertissements sur l’unité de contrôle lorsque l’avion sort des limites établies De plus, une fois ces limites franchies, des manœuvres d’urgence doivent être activées pour que l’avion revienne à la géographie de vol
S’il n’était pas possible de ramener l’aéronef dans la géographie de vol et qu’il finissait par quitter le volume opérationnel, l’activation du « Flight Termination System » doit entrer en action automatiquement
Réglementation, limites et systèmes de l'UAS
En exigeant que ce type de système soit équipé, la sécurité de l’opération est automatiquement améliorée, ce qui réduit la charge de travail du télépilote pendant le vol En outre, le lien entre les évaluations de sécurité effectuées par le télépilote avant le vol est directement lié à la configuration de l’avion, ce qui assure la cohérence entre les limites du CONOPS et l’exécution du vol en temps réel