BLOG POSTS
Geocaging für C6 UAS
In diesem Artikel wird erklärt, was Geocaging ist und wie es direkt mit dem semantischen Modell nach der SORA-Methode und anderen kritischen Flugzeugsystemen zusammenhängt
Was ist Geocaging mit Drohnen
Diese Funktion wird bereits heute von verschiedenen Herstellern angeboten, unterscheidet sich jedoch von den Anforderungen für Drohnen der Klasse C6.
Geocaging für Drohnen der Klasse C6 für das Standardszenario STS-02
Für die Zertifizierung einer C6-Drohne ist die Geocaging-Anforderung komplexer und steht in direktem Zusammenhang mit dem semantischen Modell, das in der SORA-Methodik beschrieben wird In diesem Fall beschränken wir uns nicht mehr nur auf die horizontale und vertikale Entfernung, bis zu der wir das Flugzeug fliegen lassen, sondern wir müssen auch die Fluggeografie und das Betriebsvolumen definieren.
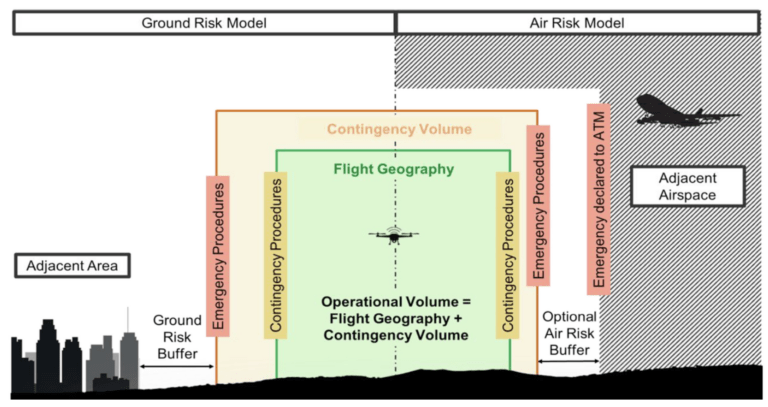
Diese „Zonen“ können einfach sein, z. B. ein Kreis um den Startpunkt, oder ein Polygon mit vielen Punkten, das an das Gebiet angepasst ist, das Sie fliegen möchten Darüber hinaus kann es je nach Fluggebiet erforderlich sein, an verschiedenen Punkten der Fluggeografie unterschiedliche Höhen festzulegen.
Mit Geocaging verbundene Systeme
Die Hauptfunktion des Geocagings besteht darin, das Flugzeug daran zu hindern, die Fluggeografie zu verlassen. Zu diesem Zweck muss Geofencing den Piloten über eine Karte und Warnungen auf dem Steuergerät informieren, wenn das Flugzeug die festgelegten Grenzen verlässt; Außerdem müssen bei Überschreiten dieser Grenzen Notfallmanöver eingeleitet werden, damit das Flugzeug zur Fluggeografie zurückkehren kann
Sollte es nicht möglich sein, das Flugzeug in die Fluggeographie zurückzubringen und das Betriebsvolumen zu verlassen, muss die Aktivierung des „Flight Termination System“ automatisch erfolgen.
Regulierung, Grenzen und Systeme der UAS
Indem die Ausrüstung mit einem solchen System vorgeschrieben wird, wird die Sicherheit des Betriebs automatisch verbessert und die Arbeitsbelastung des Fernlenkers während des Fluges verringert Darüber hinaus ist die Verbindung zwischen den vom Fernlotsen vor dem Flug durchgeführten Sicherheitsbewertungen direkt mit der Konfiguration des Flugzeugs verknüpft, so dass eine Kohärenz zwischen den Einschränkungen des CONOPS und der Durchführung des Fluges in Echtzeit gewährleistet ist.