BLOG POSTS
SORA Methodology—Specific Operation Risk Assessment
SORA comes from “Specific Operations Risk Assessment”. It is the methodology created by JARUS (Joint Authorities Rulemaking on Unmanned Systems) which establishes the procedure for creating, assessing and conducting a drone operation safely, analysing the nature of all threats associated with a specific hazard, its design, and the proposed mitigations for a specific UAS operation.
This methodology is the one chosen by the EU to meet the requirements of Article 11, which assesses the risks and approves an operation for the so-called Specific Category for the generation of the Standard Scenarios and the Operational Authorisations.
The methodology is created by a set of orderly steps combining the analysis of the operation, the risks, and the implementation of mitigation measures for their reduction.
The process on which the SORA methodology is based is defined below.
Concept of Operations (ConOps)
The ConOps is the definition of the flight to be carried out together with all the relevant information that may be necessary to include
It will contain all the information related with:
- Maximum height of the operations
- Type of operation: VLOS, BVLOS
- day / night
- Flight schedule
- Airspace typology
- Land area typology
- UAS characteristics and equipment to be used
In addition, within the ConOps, the Operational Volume and the security buffers in the air and on the ground must be defined, according to the Semantic Model that is described within the methodology itself.
Semantic Model
According to the definition of the Semantic Model in the SORA methodology, in flights carried out with drones we can find ourselves in two situations:
Controlled Operation
The Controlled Operation is the one that takes place having total control of the drones. This situation includes Normal Operations with Standard Operational Procedures and those Abnormal Situations that lead to the application of Contingency Procedures .
|
Controlled Operation |
|
|
Normal Operation |
Abnormal Situation |
|
Standard Operating Procedures |
Contingency procedures |
Uncontrolled Operation
If we lose control of the operation, we will find ourselves in an emergency, where the Emergency Procedures must be applied and the Emergency Response Plan (ERP) must be executed
|
Operation control loss |
|
Emergency situation |
|
Emergency procedures |
|
Emergency Response Plan (ERP) |
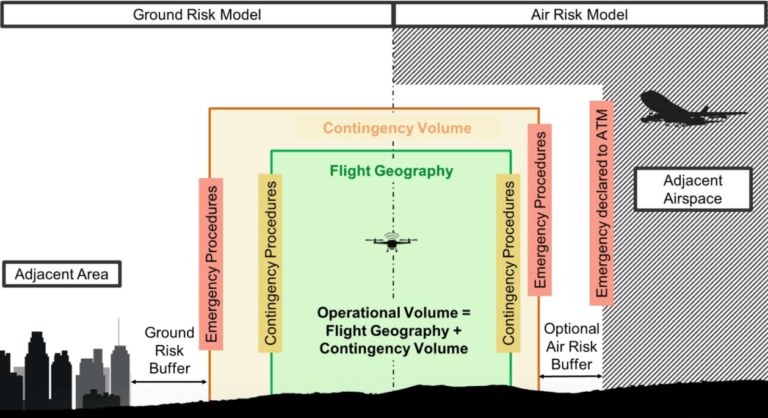
All drone operations must be planned and carried out within an Operational Volumemade up of different defined areas on the ground and in the air, where the maximum flight limits that aircraft can reach in the worst case scenario are defined.
According to the semantic model, operational volumes are defined as:
-
Flight Geography
It refers to a geographically defined volume, spatially and temporally, that is totally contained within the operating volume. Flight geography represents the volume of airspace where the operator intends the flight to be confined.
-
Contingency Volume
It refers to the volume contained between the inner and outer limits of the operating volume and flight geography, respectively. This volume is defined to contemplate the possible excursions outside the volume of the flight geography.
-
Ground Risk Buffer / Air Risk Buffer
This is defined in the SORA methodology as the intended operational area that only involves active participants, if any
-
Adjacent Area / Adjacent Airspace
They are defined as the areas in which the UAS will access if the emergency systems fail. In these areas, the volume of people there may be (for example an urban area) and the proximity to airports, air traffic density, etc., shall be studied.
In the following diagram it can be seen that both in GRC and ARC, the zones defined as Flight Geography & Contingency Volume correspond to Controlled Operations, and those defined as Risk Buffer in air and ground and Adjacent areas in the air and on the ground are those in which there is no control of the UAS.
Once the total and specific definition of the type of operation is completed, the risk analysis can continue.
Ground Risk (GRC)
The Ground Risk Class or GRC (Ground Risk Class) is defined as the risk of a person being hit by a drone. To determine the GRC, the following must be considered:
- aircraft characteristics (weight and dimensions)
- the area in which the flight will take place
- Type of flight to be carried out
In this way, SORA offers us the following table through which we can see what the initial GRC corresponding to the intended operation is:
|
Intrinsic Ground Risk Index of the UAS |
||||
|
Maximum dimensions of the UA |
1 m |
3 m |
8 m |
>8 m |
|
Expected Typical Kinetic Energy |
< 700 J |
< 34 KJ |
< 1084 KJ |
> 1084 KJ |
|
Operational Scenarios |
|
|
|
|
|
VLOS/BVLOS over a ground controlled area |
1 |
2 |
3 |
4 |
|
VLOS over a sparsely populated area |
2 |
3 |
4 |
5 |
|
BVLOS over a sparsely populated area |
3 |
4 |
5 |
6 |
|
VLOS over a populated area |
4 |
5 |
6 |
8 |
|
BVLOS over a populated area |
5 |
6 |
8 |
10 |
|
VLOS over a crowded area |
7 |
|
||
|
BVLOS over crowded area |
8 |
|||
Ground Risk Mitigations
Once the initial GRC has been determined, mitigations must be applied to reduce the risk and thus obtain the value of the Final GRC.
These mitigation measures are:
- There are implemented and effective technical containment systems
- Systems that reduce the effects of impact on people on the ground
- An effective Emergency Response Plan is in place, available for use, and has been validated
Ground Risk Final Value
At this point, it is interesting to analyse and understand the concept of Robustness applied within the SORA methodology. According to this methodology, the robustness of the mitigation measures is defined by the Level of Integrity offered by each of the mitigations (for example, the improvement in security) and the level of assurance that the mitigations have achieved (for example, the method by which it is proved).
Robustness Level = Integrity Level + Level of Assurance
Thus, we find 3 types of Robustness levels:
- Low robustness
- Medium robustness
- High robustness
Thus, depending on the Robustness values of the applied mitigation measures, the GRC value can be reduced and the Final GRC value obtained, always bearing in mind that it cannot be reduced below the minimum value of the resulting column of the table “UAS Intrinsic Ground Risk Class Index”.
|
|
Robustness |
|||
|
Mitigation number |
GRC definition |
Low/ None |
Medium |
High |
|
M1 |
There are implemented and effective technical containment systems
|
0 / -1 |
-2 |
-4 |
|
M2 |
Systems that reduce the effects of impact on people on the ground |
0 |
‐1 |
‐2 |
|
M3 |
An effective Emergency Response Plan is in place, available for use, and has been validated |
1 |
0 |
-1 |
Air Risk Class (ARC)
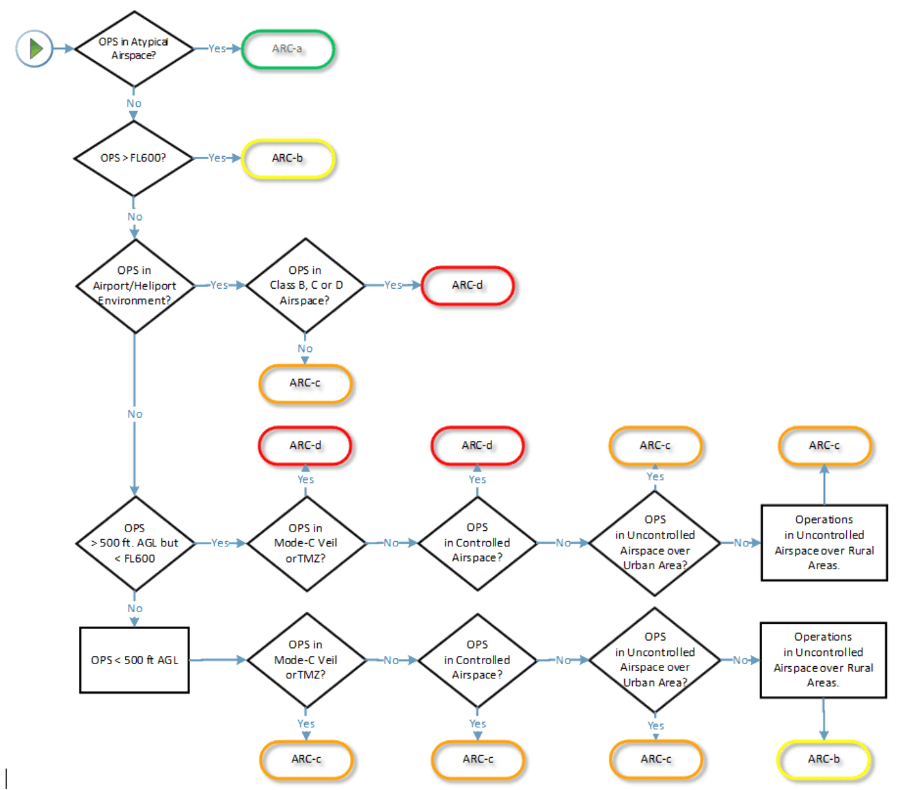
Apart from analysing the risk on the ground, SORA also determines the risk of collision in the air according to the airspace defined in the ConOps in which it will operate.The risk value is called Air Risk Class or ARC). Thus, the ARC is the classification according to the ratio in which a drone can meet a manned aircraft in a typical airspace.
To know the initial ARC, SORA provides a scheme in which, through the airspace in which it will be flown previously defined in the ConOps, the value will be obtained:
Once the initial ARC is known, it is necessary to determine the necessary mitigation measures to be able to reduce it:
Strategic ARC Mitigations
Those in which the ARC can be reduced by adjusting certain aspects before the operation. These may depend on mitigations applied by the operator itself, for instance:
- The time the flight will take place
- The duration of the flight
Or mitigations that do not depend on the operator, such as the rules and regulations themselves, such as:
- Limitation of the 400 feet of height of the drones
- Maximum flight distance limitation
Tactical Airborne Risk Mitigations (ARC)
Tactical mitigations are those that are applied to reduce the residual risk of air collision. That is, they are those that the pilot and his/her team apply at the time of the flight, such as:
- See and Avoid
- communication with ANSP services
Residual ARC Value
After having applied both types of mitigation, the value of the residual risk in the air, known as Residual or Final ARC, will be determined.
Many of the mitigations applied for ARC reduction are determined in the pre-coordinations with ANSPs.
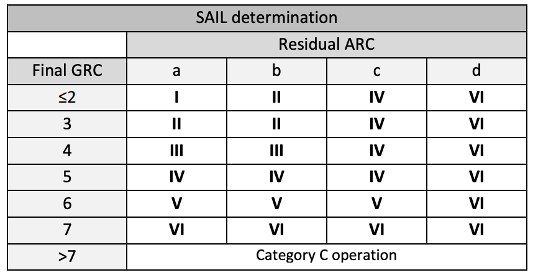
SAIL
Once both the GRC Final and ARC Final values have been calculated, we can obtain the SAIL (Specific Assurance and Integrity Level).
The SAIL is an index that goes from value one to six, that indicates the assurance and integrity of the measures that we must apply, that is, Robustness.
Thus, we can say that a low value of SAIL will imply a low value of Robustness of the mitigations to be applied, corresponding to operations with low risk. On the other hand, a higher SAIL value will imply a higher Robustness, since the risk of the operation will be, accordingly, higher.
Operational Security Objectives (OSO)
With the risk of the operation categorised with the SAIL index, we must begin to apply the different levels of Robustness of each one of the mitigations to be applied. This translates into achieving Operational Safety Objectives(OSO)
Once again we will have to consult in a table the Robustness value to apply for each of the corresponding OSO. To determine these objectives, we shall use the SAIL index obtained in the previous point. In the following image you can see a sample of a part of the OSO to be applied from the total of the 24 existing ones:
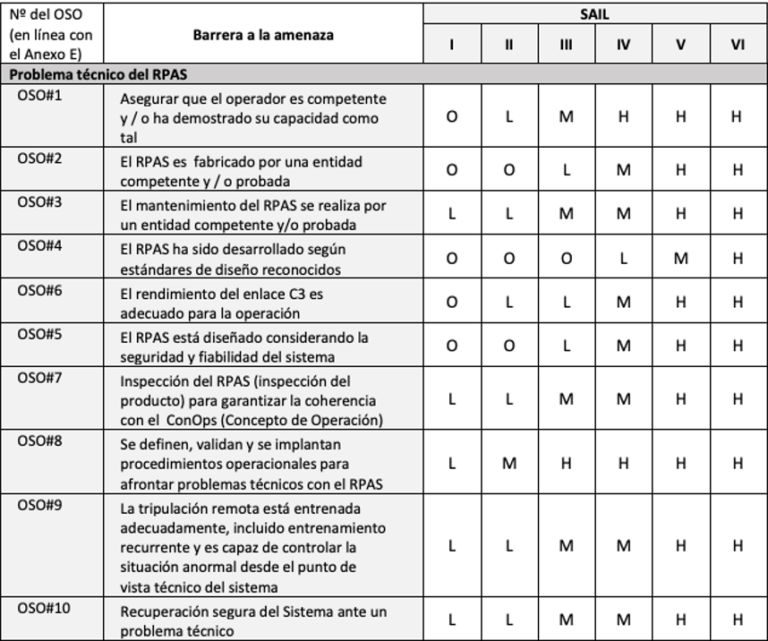
According to the SAIL index obtained, a value can be obtained that will indicate the objective of the Robustness value. These are:
- O: optional
- L: low level
- M: medium level
- H: high level
Once we know what level of robustness should be applied, the last step will be to consult the lists published by EASA how to achieve the assurance and integrity values.
Area and adjacent space
At this point we may have the feeling of having finished the whole process, but we still have a critical step left: the analysis of the area and adjacent space.
Let us remember that during the definition of the ConOps we have defined an operational volume formed by the Flight Geography, the Contingency Volume and the safety buffers on the ground and in the air. However, now is the time to look beyond these limits and analyse what we will find once we cross the limits of the ground and air buffers.
We shall analyse the associated risk with the adjacent areas, both on the ground and in the air, and determine whether they may be greater or lower than the risks within the operational volume, in which the mitigation measures corresponding to the SAIL index obtained are already applied. If the risk is higher, a series of requirements must be applied, such as:
- The probability of UAS to escape from the Operational Volume must be demonstrated in a manner commensurate with the risk caused by escaping such Operational Volume.
- No single error of the UAS or other external system can lead to the aircraft escaping from the safety buffer.
- Software and flight electronics, whose development errors could cause an escape outside the risk buffers, shall be created using a standard or methodology accepted by EASA.
To comply with the above points, in some cases, it is necessary to use external and independent Flight Termination Systems (FTS), which in turn must comply with a series of additional requirements.
If the requirements cannot be justified, or it cannot be guaranteed that the FTS works and is designed to standards, the size of the buffers on the ground and in the air should be increased enough so that aircraft cannot escape from them.
Safety report
Finally, it is time to collect all the information and data obtained from the SORA methodology and collect them in the Safety Report, which in turn will serve to demonstrate to the authorities, ANSPs or other affected parties how the methodology is being applied.
This report shall include:
- The SORA procedure:
- The Concept of Operation (ConOps)
- Mitigations used for GRC reduction
- Strategic ARC Mitigations
- Tactical ARC Mitigations
- Analysis of the adjacent area on the ground and in the air
- SAIL & OSO
- The satisfactory justification of the mitigations and the objectives required by the SORA process.
- The UAS operator shall ensure that any additional requirements not identified by the SORA process are addressed.
- The UAS operator shall ensure that the SORA procedure is consistent with actual operating conditions.
2 Responses
This blog introduces the SORA (Specific Operations Risk Assessment) methodology, shedding light on its crucial role in ensuring safe and efficient drone operations. The detailed explanation and real-world examples highlight its importance in the rapidly growing drone industry. A valuable resource for drone operators and regulators to enhance safety standards and mitigate operational risks effectively.
We appreciate your comment!